关键词:assign, 全加器
连续赋值语句是 Verilog 数据流建模的基本语句,用于对 wire 型变量进行赋值。:
格式如下
assign LHS_target = RHS_expression ;
LHS(left hand side) 指赋值操作的左侧,RHS(right hand side)指赋值操作的右侧。
assign 为关键词,任何已经声明 wire 变量的连续赋值语句都是以 assign 开头,例如:
wire Cout, A, B ;
assign Cout = A & B ; //实现计算A与B的功能
需要说明的是:
LHS_target 必须是一个标量或者线型向量,而不能是寄存器类型。
RHS_expression 的类型没有要求,可以是标量或线型或存器向量,也可以是函数调用。
只要 RHS_expression 表达式的操作数有事件发生(值的变化)时,RHS_expression 就会立刻重新计算,同时赋值给 LHS_target。
Verilog 还提供了另一种对 wire 型赋值的简单方法,即在 wire 型变量声明的时候同时对其赋值。wire 型变量只能被赋值一次,因此该种连续赋值方式也只能有一次。例如下面赋值方式和上面的赋值例子的赋值方式,效果都是一致的
wire A, B ;
wire Cout = A & B ;
全加器
下面采用数据流描述方式,来设计一个 1bit 全加器。
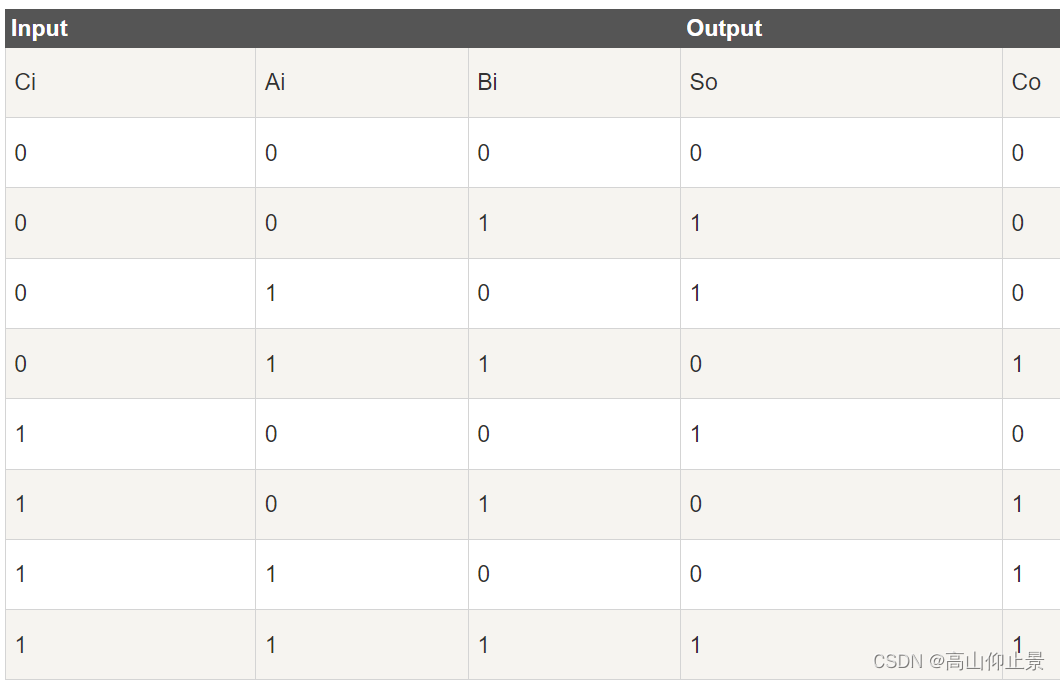
设 Ai,Bi,Ci 分别为被加数、加数和相邻低位的进位数,So, Co 分别为本位和与向相邻高位的进位数。
真值表如下:
全加器的表达式为:
So = Ai ⊕ Bi ⊕ Ci ;
Co = AiBi + Ci(Ai+Bi)
module full_adder1(
input Ai, Bi, Ci,
output So, Co);
assign So = Ai ^ Bi ^ Ci ;
assign Co = (Ai & Bi) | (Ci & (Ai | Bi));
endmodule
当然,更为贴近加法器的代码描述可以为:
module full_adder1(
input Ai, Bi, Ci
output So, Co);
assign {Co, So} = Ai + Bi + Ci ;
endmodule
testbench(test.sv)参考如下:
`timescale 1ns/1ns
module test ;
reg Ai, Bi, Ci ;
wire So, Co ;
initial begin
{Ai, Bi, Ci} = 3'b0;
forever begin
#10 ;
{Ai, Bi, Ci} = {Ai, Bi, Ci} + 1'b1;
end
end
full_adder1 u_adder(
.Ai (Ai),
.Bi (Bi),
.Ci (Ci),
.So (So),
.Co (Co));
initial begin
forever begin
#100;
//$display("---gyc---%d", $time);
if ($time >= 1000) begin
$finish ;
end
end
end
endmodule
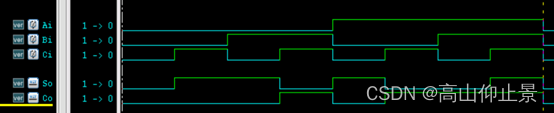
仿真如下: