1.gpio子系统介绍
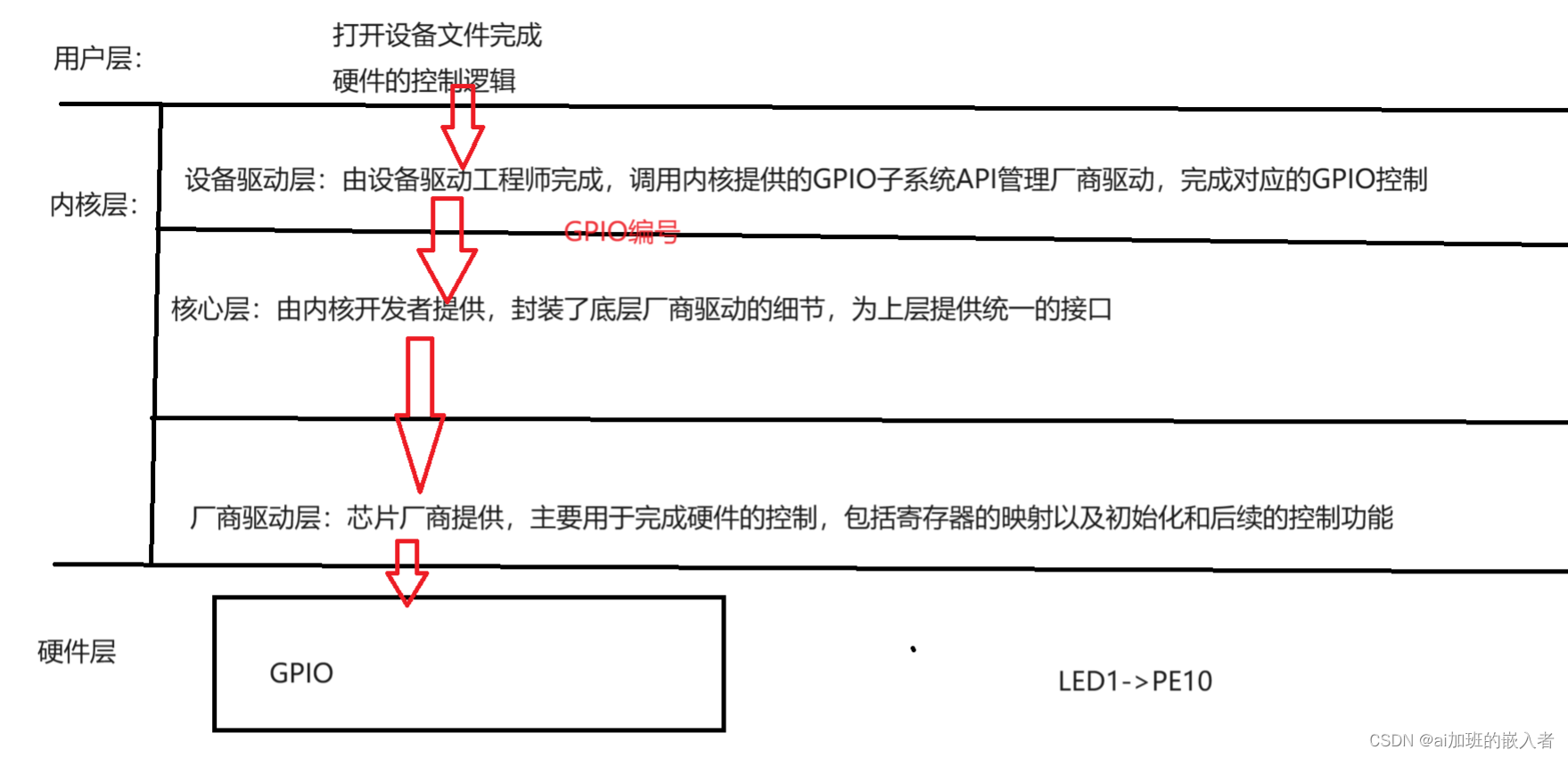
一个芯片厂商生产出芯片后会给linux提供一个当前芯片中gpio外设的驱动,我们当前只需要调用对应的厂商驱动即可完成硬件的控制。而linux内核源码中的gpio厂商驱动有很多,这里linux内核对厂商驱动做了一些封装,提供了一系列的API,我们在自己编写的设备驱动中只需要调用这些API即可访问对应的厂商驱动,进而完成GPIO的控制。
2.实现框图
3.代码
---gpiod_dri.c---驱动程序
#include <linux/init.h>
#include <linux/module.h>
#include <linux/of.h>
#include <linux/of_gpio.h>
#include <linux/gpio.h>
#include <linux/io.h>
#include <linux/device.h>
#include <linux/uaccess.h>
unsigned int major;
struct device_node *dnode;
struct gpio_desc *gpiono1;
struct gpio_desc *gpiono2;
struct gpio_desc *gpiono3;
struct class *cls;
struct device *dev;
char kbuf[128] = {0};
// 封装操作方法
int mycdev_open(struct inode *inode, struct file *file)
{
printk("%s:%s:%d\n", __FILE__, __func__, __LINE__);
return 0;
}
ssize_t mycdev_read(struct file *file, char *ubuf, size_t size, loff_t *lof)
{
int ret;
ret = copy_to_user(ubuf, kbuf, size);
if (ret)
{
printk("copy_to_ user err\n");
return -EIO;
}
return 0;
}
ssize_t mycdev_write(struct file *file, const char *ubuf, size_t size, loff_t *lof)
{
int ret;
if (size > sizeof(kbuf))
size = sizeof(kbuf);
// 从用户拷贝数据
ret = copy_from_user(kbuf, ubuf, size);
if (ret)
{
printk("copy_from_user err\n");
return -EIO;
}
switch (kbuf[0])
{
case '1':
gpiod_set_value(gpiono1,!gpiod_get_value(gpiono1));
break;
case '2':
gpiod_set_value(gpiono2,!gpiod_get_value(gpiono2));
break;
case '3':
gpiod_set_value(gpiono3,!gpiod_get_value(gpiono3));
break;
}
return 0;
}
int mycdev_close(struct inode *inode, struct file *file)
{
printk("%s:%s:%d\n", __FILE__, __func__, __LINE__);
return 0;
}
struct file_operations fops = {
.open = mycdev_open,
.read = mycdev_read,
.write = mycdev_write,
.release = mycdev_close,
};
static int __init mycdev_init(void)
{
// 1字符设备驱动注册
major = register_chrdev(0, "myled", &fops);
if (major < 0)
{
printk("字符设备驱动注册失败\n");
return major;
}
printk("字符设备驱动注册成功:major=%d\n", major);
// 2向上提交目录
cls = class_create(THIS_MODULE, "MYLED");
if (IS_ERR(cls))
{
printk("向上提交目录失败\n");
return -PTR_ERR(cls);
}
printk("向上提交目录成功\n");
// 3向上提交设备节点信息
int i;
for (i = 0; i < 3; i++)
{
dev = device_create(cls, NULL, MKDEV(major, i), NULL, "myled%d", i);
if (IS_ERR(dev))
{
printk("向上提交设备节点信息失败\n");
return -PTR_ERR(dev);
}
}
printk("向上提交设备节点信息成功\n");
// 4解析LED的设备树节点
dnode = of_find_node_by_path("/myled");
if (dnode == NULL)
{
printk("解析设备树节点失败\n");
return -1;
}
printk("解析GPIO信息成功\n");
// 5申请gpio对象
gpiono1 = gpiod_get_from_of_node(dnode, "led1-gpio", 0, GPIOD_OUT_LOW, NULL);
if (IS_ERR(gpiono1))
{
printk("申请gpio1对象失败\n");
return -ENXIO;
}
gpiono2 = gpiod_get_from_of_node(dnode, "led2-gpio", 0, GPIOD_OUT_LOW, NULL);
if (IS_ERR(gpiono2))
{
printk("申请gpio2对象失败\n");
return -ENXIO;
}
gpiono3 = gpiod_get_from_of_node(dnode, "led3-gpio", 0, GPIOD_OUT_LOW, NULL);
if (IS_ERR(gpiono3))
{
printk("申请gpio3对象失败\n");
return -ENXIO;
}
printk("申请gpio信息对象成功\n");
return 0;
}
static void __exit mycdev_exit(void)
{
// 灭灯
gpiod_set_value(gpiono1, 0);
gpiod_set_value(gpiono2, 0);
gpiod_set_value(gpiono3, 0);
// 释放GPIO编号
gpiod_put(gpiono1);
gpiod_put(gpiono2);
gpiod_put(gpiono3);
// 销毁设备节点信息
int i;
for (i = 0; i < 3; i++)
{
device_destroy(cls, MKDEV(major, i));
}
// 销毁目录信息
class_destroy(cls);
// 字符设备驱动注销
unregister_chrdev(major, "myled");
}
module_init(mycdev_init);
module_exit(mycdev_exit);
MODULE_LICENSE("GPL");---test.c---应用程序测试程序
#include <stdio.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <unistd.h>
#include <stdlib.h>
#include <string.h>
int main(int argc, char const *argv[])
{
int a;
char buf[128] = {0};
int fd = open("/dev/myled0", O_RDWR);
if (fd < 0)
{
printf("设备文件打开失败\n");
exit(-1);
}
while (1)
{
printf("请输入控制的灯:1(LED1) 2(LED2) 3(LED3)\n");
fgets(buf,sizeof(buf),stdin);
buf[strlen(buf)-1] = '\0';
//像设备文件中写
write(fd,buf,sizeof(buf));
}
close(fd);
return 0;
}
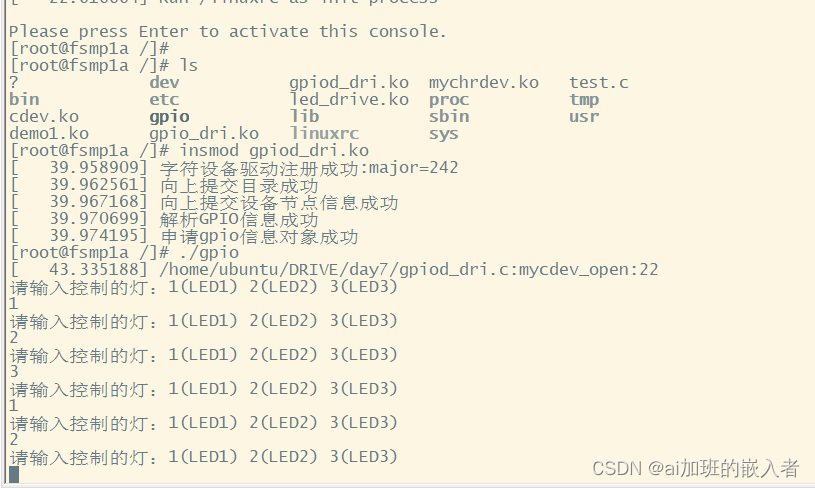
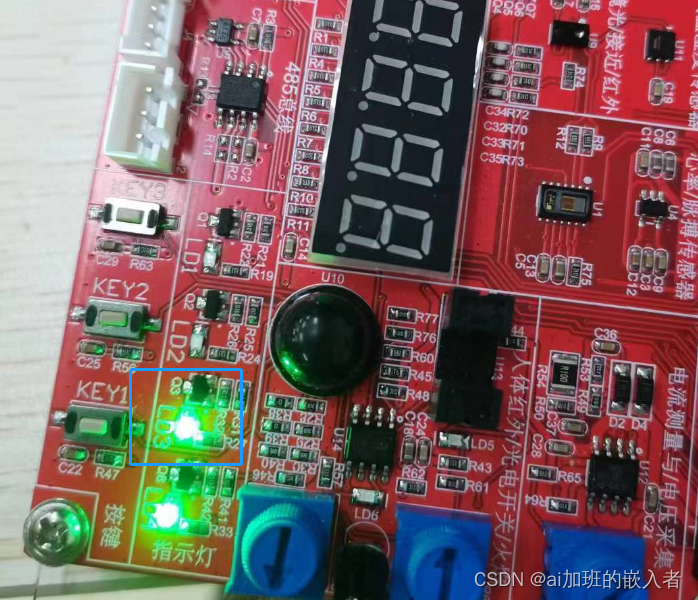
4.测试现象
输入灯编号,对状态取反;